
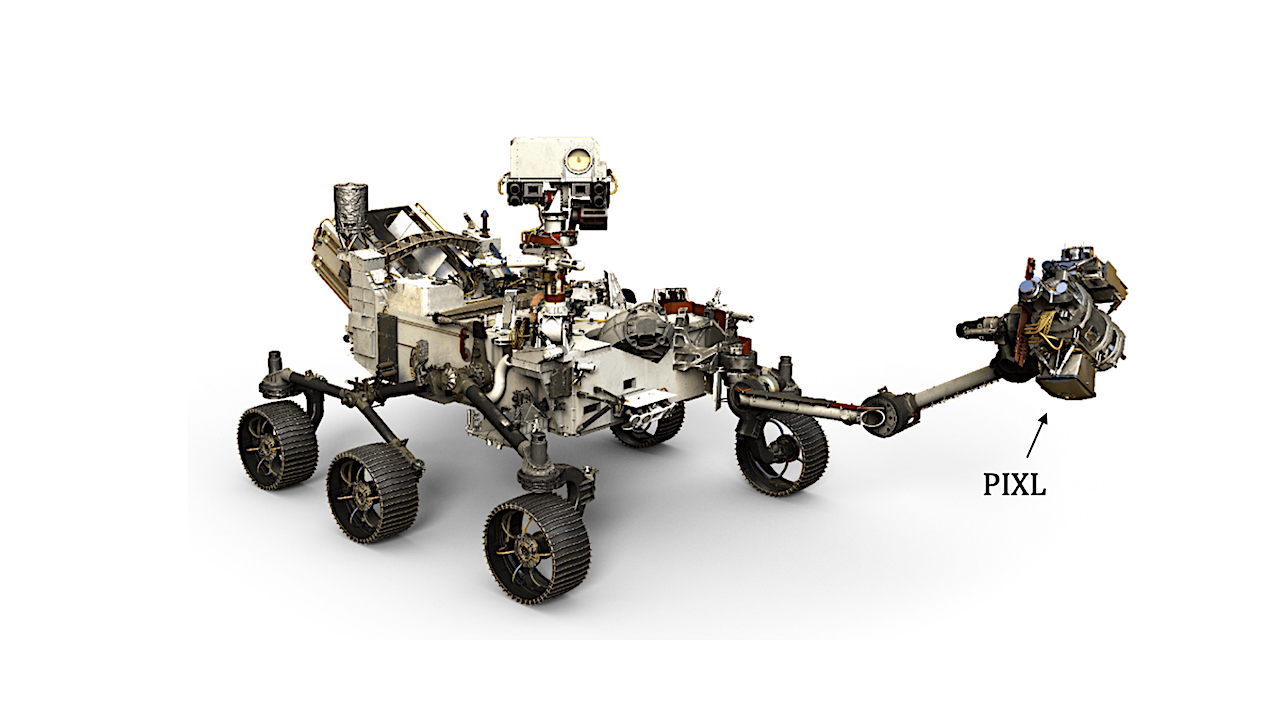
A model of the Mars rover Perseverance showing the location of PIXL at the end of the robotic arm. — NASA
Editor's NoteFrom the introduction to the paper: “At the time of writing, PIXL's adaptive sampling capability has been operational for over 951 sols (Martian days) on Mars, with over 52 scans analyzed. To our knowledge, this is the first time a spacecraft has made autonomous decisions through compositional analysis on another planet.” And the conclusion: “We successfully demonstrated a novel adaptive sampling technique with PIXL on the Mars rover Perseverance, which to our knowledge enables the first autonomous decision-making based on real compositional analysis by a spacecraft. Nearly all rules were implemented by machine learning trained on compositional analysis of PIXL Mars data acquired during the early stages of the mission.”
To send droids to other planets to study the local geology and look for signs of life, we need to give them as much autonomy as possible – autonomy that can be upgraded based on mission experience and that can improve based on the droid's own experience. We need to take the same approach with the tools we bring with us when we join our robotic partners in the field. We need to embed the latest analytical tools in the tricorders and other sensors we bring with us, both in our base camp labs and when our expedition teams deploy.
These tools must be forward/backward compatible so they can be upgraded. Even with fast communications with Earth, various message delays combine with inevitable bandwidth constraints to place a premium on field capabilities, as well as on both human and robotic creativity.
If we are going to spend significant money and national resources on such a mission (eventually with humans on board), we need to equip it as best we can – with tools that will learn just like the human crew members. Our droids are programmed by smart humans back on Earth, and they are leading the way. We have one example already in the field on Mars.
Adaptive Sampling with PIXL for the Mars Rover Perseverance
Using on-board data analytics, planetary rovers can instantly adjust their measurement plans, improving the scientific value of the data collected between commands from Earth.
This paper describes the implementation of an adaptive sampling algorithm used in the X-ray fluorescence spectrometer PIXL on the Mars 2020 rover Perseverance.
PIXL is deployed using a rover arm to measure the X-ray spectrum of rocks at a scan density of several thousand points over an area typically 5 x 7 mm. An adaptive sampling algorithm is programmed to recognise points of interest and increase the signal-to-noise ratio at those locations by performing longer integrations.

Preparing the PIXL scan of Sol 294 (Cartier). Most PIXL scans (~60%) have been conducted on wear patches exposing rock subsurface (a further 32% on natural surface and 8% on regolith). In this example, a wear patch 50 mm in diameter and ~7 mm deep was generated using the sampling and caching subsystem (Moeller et al., 2021). This patch was then dusted to ~40 mm in diameter using the gas dust removal tool. The PIXL scan of Sol 294 is 7×7 mm (layout not shown), about one-seventh the diameter of the wear patch, with 3299 points spaced 0.125 mm apart. — astro-ph.EP

PIXLISE view of carbonates detected on Sol 879 (Gabletop Mountain). Shown here is a compositional map of carbonates obtained from the PIXLISE “formula”. The formula is an equation that allows us to estimate the weight percent of a composition of interest using counts from PIXL's two detectors while accounting for diffraction effects. The grey dots are where divide-by-zero errors occur and should be ignored. — astro-ph.EP

5 x 7 mm PIXL scan of target Lake Haiyaha (sol 851), showing Cr2O3 elemental content in green. The scan contains only 3 Cr-rich grains (chromite) making up a total of 9 PMCs (0.4% of the map scan). [9 PMCs/2346 PMCs]). Chromite-bearing PMCS are defined here as PMCs with >2 wt% Cr2O3. — astro-ph.EP
Two approaches are used to develop sampling rules based on historical quantitative data: 1) representations that isolate specific regions in the ternary composition diagram, and 2) machine learning rules that set thresholds for high weight percentages of specific compounds.
The design of the ruleset is outlined and measurements from the surface of Mars are used to quantify the performance of the algorithm.
To our knowledge, PIXL's adaptive sampling represents the first autonomous decision-making based on real-time compositional analysis by a spacecraft on the surface of another planet.
Peter R. Lawson (1), Tanya V. Kizovski (2), Michael M. Tice (3), Benton C. Clark III (4), Scott J. VanBommel (5), David R. Thompson (6), Lawrence A. Wade (6), Robert W. Denise (1), Christopher M. Heirwegh (6), W. Timothy Elam (7), Mariek E. Schmidt (2), Yang Liu (6), Abigail C. Allwood (6), Martin S. Gilbert (6), Benjamin J. Bornstein (6) ((1) Retired – Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA, USA (2) Brock University, St. Catharines, Ontario, Canada (3) Texas A&M University, College Station, TX, USA (4) Space Sciences Institute, Boulder, CO, USA (5) Washington University in St. Louis, St. Louis, MO, USA (6) Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA, USA (7) University of Washington, Seattle, WA, USA)
Comments: 24 pages with 11 figures and 7 tables. Submitted to Icarus magazine
Subjects: Earth and Planetary Astrophysics (astro-ph.EP), Instrumentation and Methods for Astrophysics (astro-ph.IM)
Source: arXiv:2405.14471 [astro-ph.EP] (or arXiv:2405.14471v1 [astro-ph.EP] For this version
https://doi.org/10.48550/arXiv.2405.14471
Focus on learning more
Submission History
From: Peter Lawson
[v1] May 23, 2024 (Thu) 11:57:02 UTC (17,776 KB)
https://arxiv.org/abs/2405.14471
Astrobiology,

