
UAV with DTOE-AOF implementation
Improving efficiency, decreasing latency, and making the most of available resources are becoming increasingly important in the ever-changing world of UAV operations. Latency, bandwidth limitations, and scalability problems are problems with traditional central processing methods. This study presents the DTOE-AOF to address these issues. With AI-powered decisions and edge computing buildings, DTOE-AOF may dynamically assign computing jobs to UAVs and edge nodes according to proximity, available resources, and the urgency of the work. With its groundbreaking method, DTOE-AOF is poised to revolutionize various programs, from agricultural precision to emergency management, by reducing latency, increasing mission efficiency, and conserving resources.
MEC is commonly recognized as a basic technology for various next-generation IoT applications. Due to their versatility and ease of deployment, UAVs can provide edge computing services. UAV-enabled MEC designs may be categorized and applied. A UAV may be a relay, IoT node, or mobile EC server. First, UAVs may act as mobile nodes by sending their computing power to a MEC server. As the MEC, the UAV may monitor a cluster. The third usage of UAVs is linking mobile end nodes to MEC servers. Figure 1 shows that the UAV may submit memory- and processing-intensive operations to an MEC server as a dedicated user. Complex computational jobs may be too difficult for UAVs’ processing, memory, and battery life. Moving data processing to the ground-based MEC server may extend its battery life. Figure 1 depicts an alternate scenario in which the UAV flies with the MEC server to assist ground users with computing once they offload their jobs to it. In the third alternative, Fig. 1, the UAV acts as a central relay to let mobile users transmit their computing operations to an MEC server.

Architecture facilitated by UAVs.
UAV-enabled MECs’ design provides IoT devices with reliable, low-latency services. Still, turmoil abounds. Airborne data security, storage, administration, and UAV networking are complex. UAV mobility complicates communication, requiring greater ground-based user-UAV cooperation. The low battery power of UAVs is another challenge. More power is required for onboard computations before hovering, accelerating/decelerating, climbing/descending. To start planning for better energy and resource management immediately. Another challenge when developing UAV-enabled MEC systems for computing work is integrated route engineering. Predicting and tracking mobile user behaviour is essential for the optimum offloading of computing tasks and timely communication of computing results to consumers. Many UAV MEC services require greater trajectory design consideration. UAV blockchain integration is difficult16. UAVs pose privacy issues, air traffic law violations, quantum attacks, machine learning, and algorithmic attacks alone.
$$L= \frac{\beta .\left(\alpha . TT+ \delta . PT+ \vartheta . PT\right)}{\sigma + \rho +N \pi }$$
(1)
Equation (1) makes the examination of latency \(L\) during UAV operations more complicated. A subtle change in the importance of specific components within the latency equation is made possible by the weighting \(\text{} \beta\), \(\alpha . TT\), \(\delta . PT\), and \(\vartheta . PT\). The parameter \(\sigma\) captures the fluctuating character of the network’s capacity by modulating the influence of Wavelength on the overall delay, adding further complexity. Furthermore, the complicated network \(N\) environment is reflected in the intricate impact of the regulators \(\rho\) and \(\pi\) on Standing in line Time and Connection Overhead, respectively. This all-encompassing equation adequately captures the intricate interplay of factors, which provides a thorough comprehension of delays in UAV operations.
$$T= \frac{\theta . \left(\mu . DS+\delta . OU+\tau .ET\right)}{XE. \sigma }+BG. \omega +TS. \varphi$$
(2)
Equation (2) provides a complex formula that explores the main factors that contribute to the scalability of a system, capturing the complexities of scalability where \(T\) in UAV operations. Various weights \(\theta\), \(\mu\), \(\delta\), and \(\delta\) allow for subtle modifications to the relevance of Computational Resources \(DS\), Network Throughput \(OU\), and Data Storage \(ET\). The parameter \(\omega\) enhances the overall scalability by adjusting the impact of Workload Distribution \(BG\). In addition, the Adaptability Factor \(XE\) and System Redundancy \(TS\) dynamics are elaborately captured by the modifiers \(\omega\) and \(\varphi\). This simple formula gives a full picture of the complex interrelationships that determine the scalability of UAV operations, shedding light on the dynamics of redundancy and flexibility in the system17.
$$P= \frac{\beta . N{F}^{\gamma }+\alpha .S{U}^{\theta }}{\delta .S{T}^{\rho }}+{\sum }_{j=1}^{o}{\tau }_{j}. \left({\mu }_{j}.{BJ}_{j}^{{L}_{j}}.{CE}_{j}^{{\sigma }_{j}}.{TO}_{j}^{{\tau }_{j}}\right)$$
(3)
Equation (3) incorporates a complicated model for evaluating the performance \(P\) of UAV operations. The importance of mission efficiency where \(N{F}^{\gamma }\), response time \(S{U}^{\theta }\), and resource utilisation \(S{T}^{\rho }\) are represented by the weighted coefficients \(\beta\), \(\alpha ,\) and \(\delta\), respectively. Equational intricacy is enhanced by the inclusion of non-linear exponents such as \({TO}_{j}^{{\tau }_{j}}\), \(\mu\), and \({\sigma }_{j}\), which magnifies the influence of these basic elements on overall performance by capturing complex dependencies. Furthermore, by taking into account further elements like AI integration, edge computing \(CE\) capabilities, and dynamic job offloading methods, the terms involved add a greater degree of complexity.
UAV with MEC implementation
MEC solves the mobile IoT device resource and time issue. Backhaul congestion and network latency may be reduced with additional CC products. UAVs with data storage, processing, and communication may deploy MEC servers at network edges18. In this design, low-powered IoT devices may outsource computation to UAVs with MEC servers via line-of-sight communication. The system must forecast tasks, deploy UAVs, organize users, analyze signals, and allocate cooperative resources, among other challenges. The EC architecture suggests that transportable and adaptable UAVs will provide decentralized solutions. The flying edge architecture’s increased CC capabilities are ideal for real-time, latency-sensitive IoT applications. Moving computation from data centres to IoT devices improves real-time administration and decision-making with lower latency. An IoT system’s many endpoints flood peripheral devices with data.
Data organization and processing are needed for automated maintenance, self-monitoring, and prediction. Due to the memory and processing power gap between EC endpoints and centralized cloud servers, certain AI systems cannot analyze edge data. Any resilience-focused AI approach must prepare for memory and processing capacity restrictions. Decentralized resource distribution allows EC to fulfil client requests quicker than a CC, even with minimum processing19. Work scheduling, resource allocation, and offloading issues may dramatically impact performance. Over several decades, AI has been more popular for networking difficulties. ML is used in various areas, including networking, for its decision-making and interaction abilities. It may enhance network performance in numerous areas, including resource allocation, traffic classification and prediction, congestion control, and routing.
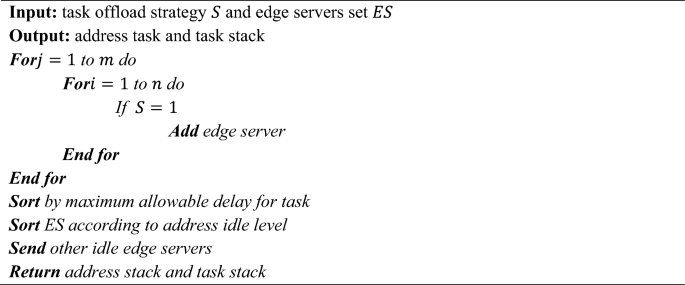
Resource allocation based on the proposed DTOE-AOF.
Algorithm 1 shows the Resource Allocation based on the proposed DTOE-AOF. Developing a resource allocation strategy aims to increase the likelihood of the task’s success. Finding the best way to reduce latency in cloud and edge-cloud collaboration systems requires a combination of communication technologies and computer resource allocation. This research developed a distributed computing-based offloading strategy that can adapt to changing user loads and achieve outstanding computing offloading capabilities. In an environment with many channels of wireless interference, our research found the best solution to the issue of offloading resources from the edge cloud to multiple users. Allotting resources among edge servers is modelled in this research. Time is of the essence for crowd activities as well since edge servers have limited processing power and load capacity and must finish computing jobs within a certain time frame. As a result, this article classifies the tasks by priority and saves them in the task stack, equivalent to the address stack in the edge server, based on the maximum permissible delay of the tasks20.
MEC systems use FMC controllers for UAVs. They typically capture user, UAV, and MEC server data. This command centre oversees AI offloading. A UAV-assisted arrangement uses a cloudlet like Fig. 2. After an IoT gadget completes an offloaded job, the UAV reports back. If the data requires more complex processing than the cloudlet can handle, the UAV may transfer it to the nearest ground servers. For IoT devices like smartphones, sensors, automobiles, and robotics, the system may use a fleet of UAVs to cover a vast area. Onboard cloudlets employ AI to handle user-generated data31.

Architecture for MEC with UAV capability.
$$DS= \frac{\beta {I}^{\theta }.{C}^{\gamma }}{\alpha . A{v}^{\mu }. {\sum }_{j=1}^{o}{\delta }_{j}. \left({Au}_{j}^{{L}_{j}}. {Au}_{j}^{{\pi }_{j}}.{En}_{j}^{{\tau }_{j}}\right)}$$
(4)
Equation (4) incorporates several critical elements into a detailed model, offering a thorough depiction of data security \(DS\). This equation emphasizes the value of protecting data from unauthorized access where \(\beta {I}^{\theta }\) as the weighted coefficient representing the importance of Confidentiality, a more nuanced portrayal of the complicated dependencies within the secrecy component is made possible by adding a layer of complexity by introducing the non-linear exponent \(\theta\). Furthermore, the weighted coefficient \({C}^{\gamma }\) highlights the significance of Availability, solving the problem of data accessibility \(\alpha . A{v}^{\mu }\) when needed. Realizing that data security extends beyond simple confidentiality \({\delta }_{j}\), the non-linear exponent \(\alpha\) adds complexity by offering a detailed description of the link with availability. The significance of maintaining unmodified and trustworthy data is shown in the non-linear sensitivity of Integrity, which is captured by the exponent \(\delta\). With their weighted coefficients and non-linear sensitivities, the terms \(\pi\), \(\tau\), and j add complexity to the equation, which permits the inclusion of additional factors like encryption \({En}_{j}^{{\tau }_{j}}\), authentication \({Au}_{j}^{{L}_{j}}\), and authorization \({Au}_{j}^{{\pi }_{j}}\).
$$Pr= \frac{\Delta .{TP}^{\nabla }}{\alpha . {TP}^{\theta }+\beta . {FP}^{\delta }+{\sum }_{j=1}^{o}{\rho }_{j}. \left(PPV. S\right)}$$
(5)
Precision \(Pr\) is an important measure in classification tasks, and Eq. (5) shows a complex model for it. The importance of True Positives where \({TP}^{\theta }\), which are positively \(PPV\) recognized, and False Positives \({FP}^{\delta }\), which are negatively connected with incorrectly labelled positive instances, are shown by the weighted coefficients, which may be represented by symbols like \(\Delta\), \(\nabla\), and \(\alpha\). The complex interdependencies \(S\) within these parts are captured by adding non-linear exponents \(\beta\), \(\rho\), and \(\theta\), which introduce a subtle sensitivity to changes.
$$MEff= \frac{\beta .{OT}^{\gamma }}{\alpha .{IT}^{\theta }+\delta . {DT}^{\varepsilon }+{\sum }_{j=1}^{o}\left(Ut. EC\right)}$$
(6)
Equation (6) introduces a comprehensive model for assessing machine efficiency \(MEff\), considering various critical factors in the production process. The weighted coefficients where \(\beta\), \(\alpha\), and \(\delta\), represent the significance of Output \({OT}^{\gamma }\), Input \(\alpha .{IT}^{\theta }\), and Downtime \(\delta . {DT}^{\varepsilon }\), respectively, in determining the overall efficiency of a machine21. Including non-linear exponents, \(\varepsilon\), j, and o adds intricacy by capturing complex dependencies within each component, allowing for a more nuanced understanding of their impact on efficiency on utilization \(Ut\) and energy consumption \(EC\).
DTOE-AOF and DTOE-AIF implementation
The framework in Fig. 3 shows a comprehensive dynamic task offloading and edge-aware optimization mechanism for intelligent and efficient UAV operations. The architecture’s interconnected pieces provide easy communication, smart decision-making, and resource efficiency22,23. The ground station is the system’s hub for managing responsibilities and collecting data. Data Collector and Task Manager are crucial Ground Station components. The Data Collector gathers data from numerous sources for analysis and decision-making, while the Task Manager orchestrates tasks to maximize execution. Wi-Fi and 5G internal communication channels allow the Ground Station and Edge Node to communicate well. Edge computing allows the Edge Node to arbitrate Ground Station-UAV communication, boosting processing efficiency and latency.

DTOE-AOF and DTOE-AIF implementation framework.
The Edge Computing Server at the Edge Node controls operations with its AI Inference Engine and Task Scheduler. These pieces enable intelligent work allocation and real-time data processing, improving system performance. The server-UAV connection using LoRa and RF ensures reliable and low-latency data delivery. UAVs have Edge Devices, which are small computers for onboard processing. These edge devices connect UAV payloads with thermal sensors, LiDAR, and cameras. In this design, UAVs may gather and evaluate sensory data in real-time to make informed judgments.Dynamic offloading lets the framework adapt to changing workloads and conditions. By considering compute load, latency requirements, and energy efficiency, edge-ware optimization ensures a reasonable task allocation between the Edge Computing Server and onboard Edge Devices. Flexibility boosts UAV responsiveness and efficiency.
$$RT= \frac{\rho . {TTC}^{\mu }}{WT.\tau +PT.\sigma +{\sum }_{j=1}^{o}{\beta }_{j}}$$
(7)
Equation (7) presents a complicated model for measuring responsetime \(RT\). Considering the processing time \(\text{where } \sigma\), waiting time \(WT.\tau\), and job completion time \(PT.\sigma\) additional aspects like concurrency, resource availability, and network latency. With this equation, it optimizes the responsiveness \({TTC}^{\mu }\) of a system in every possible scenario by considering the complex nature of reaction time in different settings.
$$RU= \frac{\omega .AU}{{IT}^{\epsilon }.\beta + {MCy}^{\sigma }.\epsilon +{\sum }_{j=1}^{o}{\varphi }_{j}}$$
(8)
Equation (8) is a complete and complex model for the nuanced evaluation of resource utilization \(RU\). The weighted coefficient \(\omega\), which emphasizes the value of Actual Utilisation \(AU\). The equation can capture complex relationships in the real utilization component since non-linearity is introduced by including the exponent \({IT}^{\epsilon }\). The effect of Maximum Capacity \(MC\) is highlighted by \(\beta\), and the non-linear sensitivity is introduced by the accompanying exponent \(\sigma\), which recognizes the complex link between resource efficiency and fluctuations in maximum capacity. The subtle impact of idle time on the overall efficiency of resource utilization is captured by the exponent j while \(\varphi\) determines the influence of Idle Time, which represents periods when a resource is not in use.
$$S= \frac{{TP}^{\alpha } . \beta }{\left(FN+TP\right). \alpha +{\sum }_{k=1}^{p}{FSe}_{k}^{{k}_{j}}}$$
(9)
A complex and detailed model for sensitivity \(S\) evaluation is shown in Eq. (9), which considers several aspects that affect the accuracy of a model for classification in detecting positive cases. The weighting factor where \(\alpha\) highlights the relevance of True Positives \(TP\), making it clear how important it is to correctly detect positive cases and add to the total sensitivity \(FS\). Incorporating non-linearity, the coefficient \(\beta\) captures complex relationships within the real positive component, enabling a more detailed portrayal of its influence. Beyond True Positive tests, \(p\) highlights the combined impact of genuine positives and FalseNegatives \(FN\), acknowledging the interconnectedness of positively detected cases and negatively classed situations. An additional layer of complexity is introduced by the exponent k, which reflects the combined effect of differences in true positives and false negatives on sensitivity j, resulting in non-linear sensitivity to these variables.
UAV-aided wireless network implementation
The proposed UAV-aided wireless network idea addresses the challenges of operating in areas without signals and poor communication infrastructure. This system uses an Endpoint Device (ED) to collect, analyze, and transfer data to the cloud in real-time. The proposal recommends employing UAVs as mobile base stations to provide temporary communication links in areas without physical connections18. Figure 4 shows the UAV-aided internet architecture in 3D with two-hop full-duplex communication. With this payload, the UAV may briefly connect to a signal-less environment. The UAV may relay after connecting to an access point in a signal-bearing zone.

UAV positions in various periods.
The relay system uses amplify-and-forward (AF). This method amplifies the incoming signal without demodulating or modulating. Signal processing is simplified by this technology, making it appropriate for UAV operations in remote places with limited computing resources. The recommended solution increases communication range by deploying UAV-assisted relays to bypass signal restrictions in challenging situations. A two-hop full-duplex transfer scenario ensures complete data delivery between the ED and the cloud. Using the bridge the UAV momentarily puts up, the ED can transfer data to the cloud even without a signal. The model considers UAV-assisted relay building time- and space-related dynamics in three dimensions for accurate placement and movement. The recommended communication method uses the amplify-and-forward strategy, which is mathematically stated to explain signal reception and transmission. This study proposes a wireless network that can interact in poor signal areas using UAVs with amplify-and-forward relay methods. This unique technique may be used for disaster relief, remote sensing, and other locations lacking communication networks.
$$R= \frac{{PoS}^{\partial }. \beta }{{{{A }^{\tau }V}^{\delta }}^{\mu }. \alpha +(R . Re)}$$
(10)
For a detailed evaluation of a system’s robustness \(R\), Eq. (10) provides a complete and complex model. The importance of System Performance is shown by the weighted coefficient,where \({PoS}^{\partial }\), which highlights the total system functionality’s holistic value in determining the system’s robustness. By including the exponent \({{{A }^{\tau }V}^{\delta }}^{\mu }\), non-linearity is introduced, allowing the system performance component to capture complex relationships \(\delta\). Because the system is not linear, the effects of performance fluctuations \((R . Re)\) on the system’s resilience \(\alpha\) may be more precisely and nuancedly depicted.
$${I}_{j}={i}_{o}{\exists }_{j}^{-2}\frac{{i}_{o}}{{I}^{2}+\Vert {q}_{N}-{q}_{V}\Vert }, J\in M$$
(11)
In the Eq. (11), where the distance between \({I}_{j}\) and the MES is denoted as \({i}_{o}\), and the channel gain at a reference distance where \({i}_{o}\), \({I}^{2}\), may be used to calculate the channel gain between \({q}_{N}\) and the \({q}_{V}\).
$${S}_{j}= \frac{C}{o}{log}_{2}\left(1+\frac{{Q}_{u}{\left|{I}_{j}\right|}^{2}}{{Y}^{2}}\right), J\in M$$
(12)
In the Eq. (12), where \({S}_{j}\) is the transmission bandwidth between the C and the O; for offloading communication \({Q}_{u}\), it can be further split into \({I}_{j}\) and \({Y}^{2}\) sub-bands.
Energy optimization process
Inefficiency caused by fixed emission energy for data transmission must be considered to lengthen Edge Devices (EDs) working time by avoiding energy loss. Predetermined emission energy may result in received signal energy that exceeds receiver sensitivity, wasting energy and reducing efficiency. To address this difficulty, a unique DL-based energy optimization technique adapts emission energy levels to ambient factors. This algorithm’s implementation framework is shown in Fig. 524. The suggested method dynamically adjusts emission energy levels to increase energy efficiency and ED operational time. The program starts with issue formulation to discover and quantify environmental factors affecting emission energy under constrained circumstances.

Process of energy optimization.
Next, a DL technique creates a prediction model to manage transmission time delay-induced environmental variable uncertainties. DL’s ability to recognize complex data patterns helps forecast the appropriate emission energy levels depending on environmental parameters. Figure 5 shows the algorithm’s data collecting, model development, and energy optimization stages. Sensors capture environmental data and add it to the prediction model to calculate emissions energy. The DL algorithm learns from past data and adapts to new scenarios to anticipate ideal emission energy levels in real-time. This reduces transmission delays.
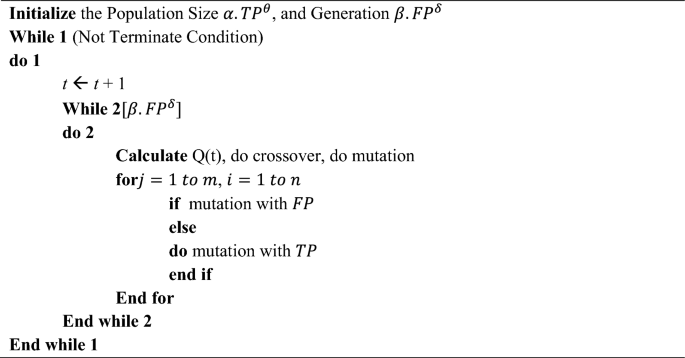
UAVs for power load matching of ML system.
Algorithm 2 shows the UAVs for Power Load Matching of ML System-based task offloading strategy. Random initialization of the actor-network and critic-network parameters is performed in the beginning stage of training. Following training, this research normalizes the state observations, feeds them into the hybrid action network, and produces continuous and discrete action distributions. Next, the policy is executed, and the UAV is rewarded. In this instance, the processing is vulnerable to abortion if the UAV travels outside of the designated region. Our study has real-world applications when natural catastrophes damage communication equipment or when there is a need to temporarily unload data volumes in hotspots, where it is possible to deploy adaptable UAVs quickly. Studying flight planning and task-offloading procedures is essential and shows promise.The adaptive DL-based energy optimization system can dynamically adapt to changing environmental conditions by modifying its predictions as fresh data is collected. The technique optimizes emission energy levels using real-time data to reduce energy waste and enhance ED operating duration in resource-constrained contexts. DL-based energy optimization solves the fixed emission energy constraint in the future, improving ED energy efficiency. Real-time prediction and adaptation optimize energy usage, extending operational times and improving performance in energy-saving settings.
$${\rho }_{j}=Qs\left\{{\ni }_{M}\ge {\ni }_{U}^{j}\right\}={\int }_{{\omega }_{th}^{j}}^{\varphi }{f}^{-y}dy={f}^{-{\mu }_{U}^{j}}$$
(13)
Within the framework of a reliability study, the probability density function (PDF) of a random variable \({\rho }_{j}\) is described by Eq. (13)25. In the interval where the maintenance of the intensity \({\ni }_{M}\) is equal to \(Qs\) or larger than the use intensity \({\ni }_{U}^{j}\), the integral of the PDF \(f\) over Qs is used to determine the variable \({\omega }_{th}^{j}\). The integration is carried out as \(\varphi\) from the threshold value \({f}^{-y}dy\).
$${\ni }_{m}^{j}=\frac{{d}_{j}}{{g}_{m}^{j}}+{\Delta }_{j}\left(\left(1-\nabla \right){\partial }_{M}+\delta \right)$$
(14)
It seems like Eq. (14) describes a connection using variables where \({\ni }_{m}^{j}\) and some constants. A more thorough explanation of the symbols, terminology,and extra context would greatly assist in providing a more accurate interpretation. Nevertheless, according to popular mathematical modelling notations, it appears to stand for a formula that expresses the maintenance intensity \({d}_{j}\) as a function of \({g}_{m}^{j}\), \({\Delta }_{j}\), \(1-\nabla , {\partial }_{M}\), and \(\delta .\) Some systems or processes may have a relationship between the rate or intensity of maintenance.
$${P}_{m}^{j}= \in {U}_{m}^{j}+\left(1-\ni \right){\vartheta }_{m}^{j}$$
(15)
where the quantity \({P}_{m}^{j}\) is shown mathematically as a mixture of two terms where \(\in {U}_{m}^{j}+\left(1-\ni \right)\). Potential variables or functions in this equation include \({U}_{m}^{j}\) and \({\vartheta }_{m}^{j}\), with \(\ni\) acting as a constant or coefficient.
The DTOE-AOF and DTOE-AIF framework are are developed to improve the allocation of computing tasks between central cloud servers and edge devices. It is a dynamic evaluation of factors such as computational load, energy consumption, and network latency that this framework uses to find the ideal execution site for each operation. The system uses real-time data and predictive algorithms to ensure that immediate attention computations are carried out on edge devices. It also ensures that computations that require more resources are transmitted to the cloud. The potential of this edge-aware method to increase overall system performance, minimize latency, and preserve bandwidth is of great advantage to applications that are integrated into the IoT, smart cities, and autonomous systems. The framework can effectively handle distant computing resources in ever-changing circumstances and workloads because of its flexibility and adaptability.
The DTOE-AOF and DTOE-AIF stands out as a trailblazing solution that successfully tackles the problems that come with UAV operations. Optimizing task allocation according to proximity and pressure, DTOE-AOF achieves tremendous mission efficiency, reaction time, and resource utilization benefits by seamlessly combining AI algorithms with computing edge capabilities. Its versatility, proven by many modelling studies, highlights its possibility of transforming UAV operations in several fields. The DTOE-AOF and DTOE-AIF architecture performance and scalability are applicable in various fields, from precision gardening to catastrophe management. This study paves the way for future developments in autonomous aerial systems and improves UAV capabilities.


